Autosub6000
Autosub6000 is an unmanned, autonomous underwater vehicle (AUV) - or in other words, a robot submarine. It is not attached to the ship, nor is it remotely controlled in any way. Instead, Autosub6000 is pre-programmed with instructions for its missions, which it then completes on its own in the dark depths, leaving the ship free to carry out other scientific tasks.
In appearance, Autosub6000 is a yellow torpedo-shaped vehicle, 5.5 metres long and 0.9 metres in diameter. Out of the water, it weighs 1800 kilograms, and is launched and recovered by a special gantry bolted to the deck of the ship. The vehicle and its gantry can be shipped anywhere in the world in a standard cargo container.

Autosub6000 is the latest in a series of Autosub vehicles developed by engineers at the National Oceanography Centre, Southampton. The '6000' refers to the vehicle's 6000 metre (3.73 mile) depth rating, which makes it the deepest diving Autosub model so far, capable of reaching more than 90 percent of the ocean floor.
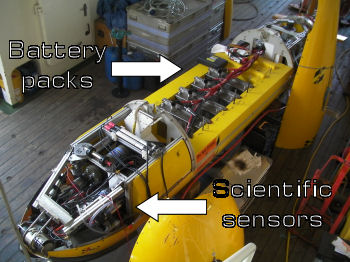
Unlike remotely-operated vehicles (ROVs) that are powered from the ship by umbilical cables, free-swimming underwater vehicles like Autosub are powered by batteries. Earlier Autosubs were powered by regular D-cell batteries - 5500 of them, which took half a day to change. But Autosub6000 instead uses up to twelve rechargeable lithium-ion polymer battery packs.
How long the battery packs last depends on the vehicle's speed and the power demands of the sensors that it is using. For our Cayman Trough missions, Autosub is carrying four battery packs, which should last for around 27 hours at usual speeds and with standard sensors. That endurance is plenty for our missions hunting deep-sea vents on the ocean floor. The battery packs can recharge fully in six hours, allowing rapid turnaround of the vehicle between missions.
To navigate, Autosub6000 receives GPS signals when it is at the surface. But GPS signals cannot reach beyond the surface of the sea. So beneath the waves, Autosub6000 uses an inertial navigation system and an acoustic navigation system when it is within 200 metres of the seabed.
The acoustic navigation system uses the phenomenon of Doppler shift - the difference in pitch of a sound or other waveform when it is moving towards or away from an observer. The navigation system sends out pings of sound, and then measures the Doppler shift in the pings that bounce back from the seafloor. From this information, the vehicle can work out exactly how it is moving relative to seabed.
Autosub6000 can fly across the seafloor at a constant altitude, climbing and diving as the seafloor undulates beneath it. It also has a collision-avoidance sonar, which scans the water ahead of it for obstacles such as underwater cliffs. When the vehicle detects a potential obstacle, it calculates whether it can climb over it, and does so if it can. But if it calculates that it cannot, it turns around and retreats, before trying its original course again at a higher altitude.
Page 1: Our yellow submarine
Page 2: Our Cayman Trough missions
Want to dive deeper?
Listen to a NERC Planet Earth podcast about Autosub6000
Download the technical specifications of Autosub6000
Read about the test dives of Autosub6000 in preparation for our expedition
Technology
Take a tour of our research ship and our undersea vehicles, sensors and systems for exploring the ocean floor.
What are we using?